



Egresado de la UNCUYO creó un robot que detecta y clasifica elementos peligrosos mediante visión artificial
Lo desarrolló el ingeniero Maximiliano García Girón. El dispositivo puede operar a distancia y solo necesita una red wifi para funcionar. Sus características lo transforman en una herramienta clave para tareas puntuales, como las distintas misiones que llevan adelante los equipos de bomberos.
Maximiliano García Girón creó un robot que detecta y clasifica elementos peligrosos mediante visión artificial. Foto: Unidiversidad.
El ingeniero egresado de la UNCUYO Maximiliano García Girón desarrolló un robot móvil que tiene la capacidad de detectar y clasificar elementos peligrosos mediante el uso de la visión artificial. El aparato es operado a distancia y solo es necesario contar con una red wifi para ser utilizado, lo que lo transforma en una herramienta clave para tareas puntuales, como las distintas misiones que llevan adelante los equipos de bomberos.
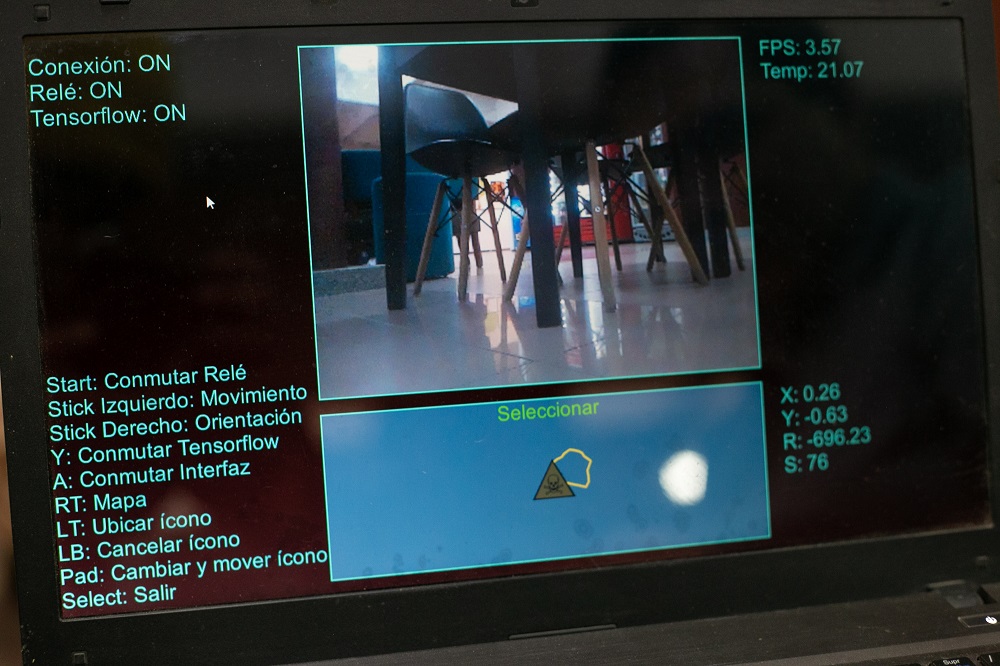
Este nuevo desarrollo tecnológico tiene como objetivo principal identificar elementos peligrosos para la salud de las personas, como por ejemplo desechos químicos o distintos objetos inflamables. “El robot está preparado para detectar cinco clases de señales peligrosas: biológicas, corrosivas, inflamables, radioactivas y tóxicas”, detalló Maximiliano García Girón. El invento lo realizó para recibirse en la carrera de Ingeniería Mecatrónica de la Facultad de Ingeniería (FI) de la Universidad Nacional de Cuyo (UNCUYO).
 El dispositivo es operado a distancia y solo necesita una red wifi para funcionar.
El dispositivo es operado a distancia y solo necesita una red wifi para funcionar.
Para poder lograr su misión y dar de manera efectiva con estos elementos riesgosos, este aparato tiene incorporada la simbología desarrollada por las normas IRAM, las cuales derivan de las normas ISO, que vendrían a ser los ojos de este artefacto.
“En este punto fue donde encontramos una de las dificultades más grandes que tuvo este proyecto. Tuvimos que realizar un fine tuning (ajuste fino) porque el modelo de inteligencia artificial presentó inconvenientes, como el de identificar falsos positivos o confundir las clases que rastreaba. Por ejemplo, detectaba con más facilidad la señal de objetos inflamables, mientras que no lo hacía con elementos corrosivos a determinada distancia”, contó el creador del robot.
 El robot puede detectar cinco señales peligrosas: biológicas, corrosivas, inflamables, radioactivas y tóxicas.
El robot puede detectar cinco señales peligrosas: biológicas, corrosivas, inflamables, radioactivas y tóxicas.
En cuanto a la distancia máxima de investigación, el robot operado a través de visión artificial depende en su alcance de la propia red de wifi y podría ser extensible mediante repetidores, aunque aún no se han hecho pruebas al respecto.
Sobre la función principal que persigue este nuevo desarrollo, el ingeniero García Girón remarcó que se trata de un “dispositivo de búsqueda y no de rescate”, lo que significa que funciona como un “apoyo en determinadas tareas puntuales, como por ejemplo es el caso de las distintas misiones realizadas por los bomberos voluntarios”.
Por otra parte, es necesario destacar sobre su funcionamiento que una vez identificados los distintos elementos peligrosos, el robot dibuja sobre un mapa los puntos donde se encuentran los mismos.
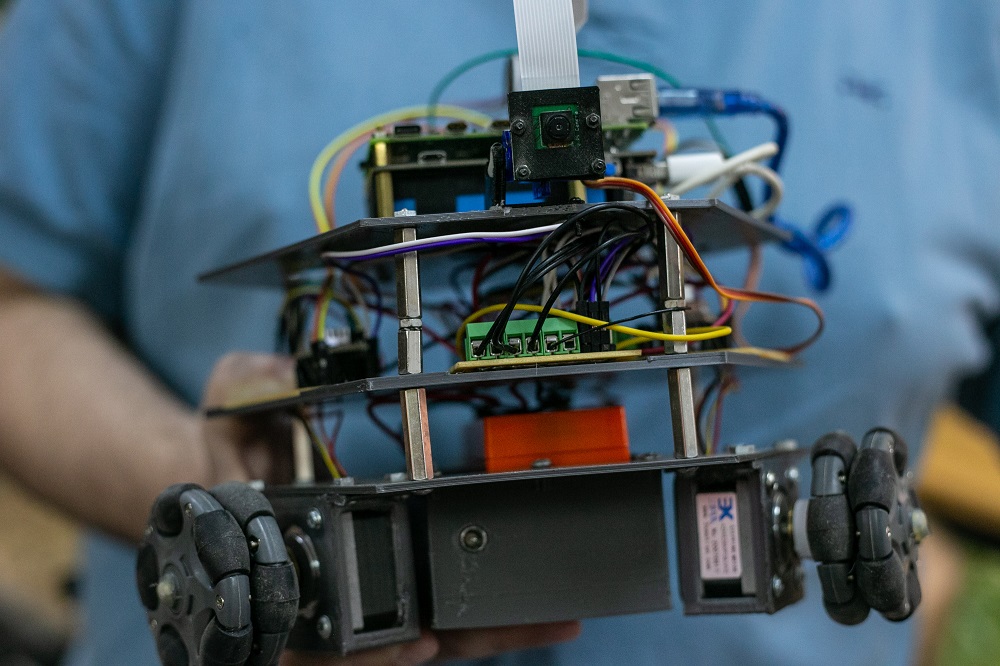
“En cuanto al sistema de navegación o métrico inercial, el robot utiliza dos tipos de sensores para determinar dónde se encuentra posicionado. El más importante de ellos es conocido como medición o métrica de la posición o navegación. Normalmente se utiliza un encoder que cuenta en base a la cantidad de pulsos, es decir, la cantidad de vueltas que dio el robot. En este caso, no utilicé un encoder sino que implementé un motor paso a paso, el cual cumple la misma función, además de dar movimiento”, puntualizó el ingeniero de la UNCUYO.
 García Girón utilizó una mecánica que se basa en sumar las fuerzas que producen las distintas ruedas para dar movimientos independientes.
García Girón utilizó una mecánica que se basa en sumar las fuerzas que producen las distintas ruedas para dar movimientos independientes.
En tanto, el creador de este robot operado a distancia explicó que su invento todavía no ha sido comercializado porque la idea es seguir desarrollándolo. Y también remarcó que restan detalles técnicos para mejorar su funcionalidad, como por ejemplo lograr reducir el peso actual que utiliza la inteligencia artificial y, de la mano de eso, alivianar el tamaño de la placa raspberry. Esta situación provocó que el ingeniero recibido en la UNCUYO se viera obligado a utilizar un modelo muy pequeño y realizar algunos ajustes sobre la identificación de objetos peligrosos.
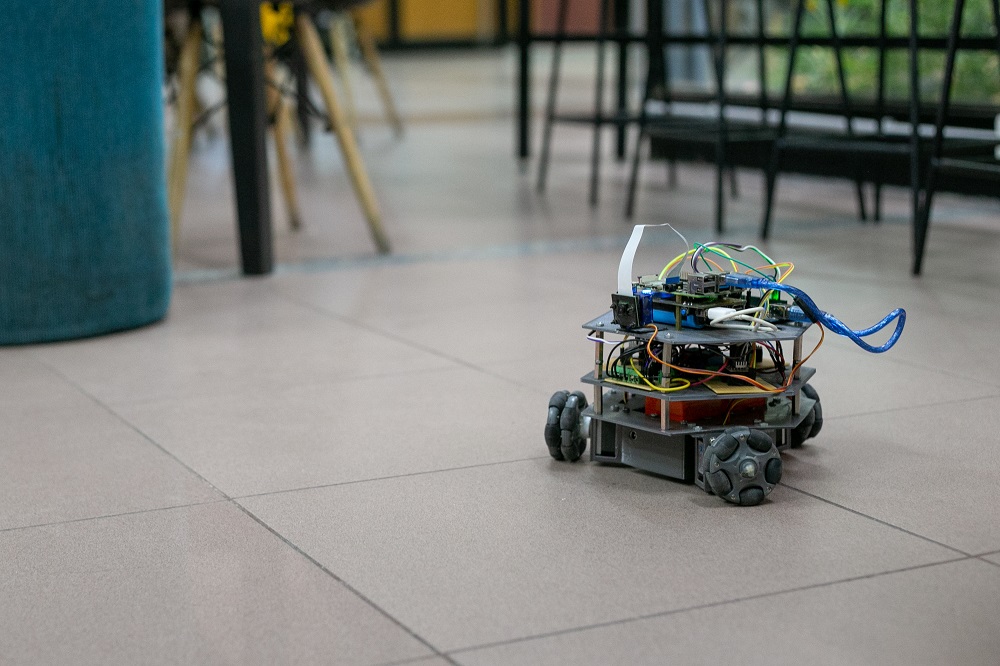
Finalmente, García Girón hizo hincapié en que utilizó una mecánica que se basa en sumar las fuerzas que producen las distintas ruedas para dar movimientos independientes. Eso significa, que el robot puede rotar sobre su eje sin moverlo y ser manejado con un simple joystick, similar a los que se utilizan en los videojuegos.
 El robot puede rotar sobre su eje sin moverlo y ser manejado con un simple joystick, similar a los que se utilizan en los videojuegos.
El robot puede rotar sobre su eje sin moverlo y ser manejado con un simple joystick, similar a los que se utilizan en los videojuegos.
“La libertad de movimiento que tiene es una de las mejores características que se logró en este ejemplar. Este trabajo estuvo pensado como una prueba de concepto y en una visión a futuro que permita ampliar otros tipos de robots. Por la libertad que ofrece este dispositivo, es posible que se pueda mejorar el hardware y el software. Estas modificaciones podrían mejorar el acceso a determinados lugares, como también que suba escaleras o pueda funcionar en diferentes tipos de suelo”, agregó García Girón.
Por último, el ingeniero remarcó que su creación le permitió bajar a tierra muchos conocimientos de electrónica de potencia, como también de mecánica, ambos entrelazados con un trabajo arduo de investigación.
 Fotos: Unidiversidad.
Fotos: Unidiversidad.
robot, inteligencia artificial, distancia, maximiliano garcía girón, ingeniero, uncuyo, 2024,

A un año de la marcha federal universitaria
El 24 de abril de 2024, una multitud se movilizó en todo el país por la educación pública, gratuita ...

23 DE ABRIL DE 2025

El 80% de las personas en Argentina adhiere a un Estado presente en educación, salud y obras públicas
Una investigación indicó que las políticas públicas implementadas en las últimas décadas para ...
23 DE ABRIL DE 2025
Segundo Encuentro de Literatura Fantástica y Fantasy Anglosajón
Se realizará los días 29 y 30 de abril de 2025, de 9:00 a 13:00, en la FFyL de la UNCUYO, con ...
23 DE ABRIL DE 2025